Sistem kendali terintegrasi perangkat lunak dan perangkat keras adalah teknologi yang mewujudkan pengendalian dan pengelolaan peralatan, mesin, sistem, atau proses yang efisien. Jenis sistem ini banyak digunakan dalam otomasi industri modern, manufaktur pintar, Internet of Things (IoT) dan bidang lainnya. Mereka mengintegrasikan perangkat keras yang berbeda (seperti sensor, pengontrol, aktuator) dan sistem perangkat lunak (seperti pemrosesan data, pemantauan, dan algoritma komputasi) untuk mencapai kontrol yang lebih fleksibel, efisien, dan tepat.
Keuntungan dari sistem kontrol terintegrasi perangkat lunak dan perangkat keras
Efisiensi tinggi dan kontrol yang presisi: Sistem perangkat lunak dan perangkat keras yang terintegrasi memungkinkan pengumpulan data yang tepat dan analisis instan, sehingga mencapai umpan balik kontrol yang lebih cepat dan akurat, mengurangi tingkat kerusakan, dan meningkatkan efisiensi produksi.
Fleksibilitas dan skalabilitas: Desain modular perangkat lunak memungkinkan sistem diperluas secara fleksibel sesuai dengan kebutuhan yang berbeda dan disesuaikan dengan lingkungan operasi yang berbeda.
Pemantauan dan analisis data secara real-time: Dilengkapi dengan fungsi pemantauan waktu nyata, menyediakan pemeliharaan preventif dan mengurangi biaya pemeliharaan dan waktu henti produksi.
Manajemen dan kontrol jarak jauh: Mewujudkan pemantauan dan kontrol jarak jauh melalui koneksi jaringan, meningkatkan fleksibilitas operasional.
Desain sistem tertanam: Prosesor tertanam bertanggung jawab untuk memproses data sensor waktu nyata dan menggerakkan perangkat keras untuk melakukan operasi terkait.
PLC (Pengontrol Logika yang Dapat Diprogram): Perangkat kontrol perangkat keras utama dalam otomasi industri, yang bertanggung jawab untuk mencapai kontrol mekanis yang tepat.
HMI (Antarmuka Mesin Manusia): Menyediakan antarmuka bagi orang-orang untuk berinteraksi dengan sistem, menjadikan pengoperasian lebih intuitif.
SCADA (Sistem Kontrol Pengawasan dan Akuisisi Data): Digunakan untuk pemantauan dan pengumpulan data fasilitas industri besar, menyediakan data visual secara keseluruhan.
Internet Industri untuk Segala (IIoT): Mewujudkan koneksi perangkat di lokasi berbeda, sinkronisasi data lintas platform, dan operasi kolaboratif.
Komputasi tepi dan teknologi cloud: Komputasi tepi mengurangi latensi, dan teknologi cloud menyimpan dan menganalisis data secara terpusat untuk meningkatkan kinerja sistem.
Ruang lingkup aplikasi
pabrik pintar: Otomatisasi produksi, pemantauan proses, dan pengambilan keputusan yang cerdas.
Manufaktur otomatis: Termasuk jalur perakitan otomatis, kontrol lengan robot, dll.
Transportasi cerdas: Manajemen sistem transportasi cerdas, lampu lalu lintas, pemantauan dinamis kendaraan, dll.
manajemen energi: Mengoptimalkan pengoperasian peralatan energi dan mengurangi konsumsi energi.
Manajemen peralatan medis: Pemantauan operasi dan manajemen cerdas perangkat medis.
Tren perkembangan masa depan
Dengan pesatnya perkembangan kecerdasan buatan (AI), komunikasi 5G, dan teknologi komputasi edge, sistem kontrol terintegrasi perangkat lunak dan perangkat keras akan berkembang ke arah yang lebih cerdas, lebih terhubung, dan lebih efisien. Teknologi-teknologi ini akan meningkatkan kemampuan pengambilan keputusan secara otonom pada sistem dan memungkinkan interoperabilitas yang lebih besar, sehingga membawa proses otomasi lebih jauh di berbagai industri.
Sensor perpindahan laser
1. Penggunaan sensor perpindahan laser
Sensor perpindahan laser adalah alat pengukur non-kontak presisi tinggi yang dapat mengukur sifat fisik benda seperti perpindahan, jarak, dan ketebalan. Penggunaan biasanya mencakup langkah-langkah berikut:
Instalasi dan perbaikan:Pasang sensor pada posisi stabil untuk memastikan sinar laser sejajar dengan target pengukuran.
Pengkabelan dan konfigurasi:Hubungkan jalur daya, komunikasi, dan keluaran sinyal sensor ke pengontrol sesuai dengan instruksi dalam manual, dan atur parameter awal.
Sesuaikan rentang pengukuran:Sesuai dengan persyaratan pengukuran, atur rentang pengukuran, akurasi, dan daya laser yang sesuai untuk memastikan akurasi pengukuran.
2. Metode pengendalian
Kontrol sensor perpindahan laser dapat diatur secara manual melalui tombol bawaan perangkat, atau dapat diotomatisasi melalui komunikasi serial atau kontrol PLC.
Pengaturan manual:Gunakan kontrol pada sensor untuk membuat pengaturan jangkauan, sensitivitas, dan filter.
Kontrol komunikasi:Gunakan protokol komunikasi seperti RS-232C atau RS-485 untuk mengirimkan instruksi melalui pengontrol untuk pengaturan jarak jauh dan pembacaan parameter.
Kontrol PLC:Hubungkan sensor ke PLC dan gunakan pemrograman PLC untuk mengontrol start, stop, pembacaan data, dan operasi sensor lainnya.
3. Penerapan sensor perpindahan laser
Sensor perpindahan laser banyak digunakan dalam berbagai kesempatan pengukuran presisi, antara lain:
Pengujian produk:Uji ketebalan, kerataan produk, dll. di lini produksi untuk memastikan kualitas.
Kontrol posisi:Digunakan untuk kontrol posisi lengan robot dan peralatan lainnya untuk mengukur jarak secara akurat guna memastikan akurasi pengoperasian.
Pengukuran bentuk:Ukur bentuk permukaan benda tidak beraturan, seperti benda kerja logam atau komponen elektronik, dan periksa ketidakrataan dan cacat permukaan.
Pemrosesan presisi tinggi:Ini digunakan dalam pemrosesan komponen kecil dengan presisi tinggi, seperti proses pembuatan mikroelektronika dan semikonduktor.
4. Contoh program sederhana (menggunakan kontrol PLC)
Berikut ini adalah contoh program sederhana penggunaan PLC untuk mengendalikan sensor perpindahan laser OMRON:
// PLC program example
// Jalankan sensor, baca nilai perpindahan dan proses
START:
MOV #0001, D0 // Aktifkan sensor
TUNGGU 100 // tunggu 100 milidetik
MOV D10, D1 // Simpan nilai pembacaan sensor di D1
CMP D1, #0500 // Bandingkan nilai perpindahan untuk melihat apakah memenuhi standar
JUMP OK, D1 >= #0500
MOV #0002, D0 // Jika tidak terpenuhi, kirimkan sinyal peringatan
BERHENTI
OK:
MOV #0000, D0 // Hentikan peringatan
BERHENTI
Dalam contoh program ini, PLC mengaktifkan sensor OMRON melalui instruksi sederhana dan terus membaca nilai. Jika nilai terukur tidak mencapai kisaran yang diharapkan, sistem akan mengeluarkan sinyal peringatan. Proses kontrol ini memungkinkan deteksi dan kontrol otomatis.
Kontrol terminal komputer Sensor perpindahan laser OMRON
1. Tinjauan pengendalian komputer
Sensor perpindahan laser OMRON dapat dikontrol dan diperoleh melalui komputer, menjadikannya lebih fleksibel untuk digunakan dalam skenario pengukuran, pemantauan, dan analisis data dengan presisi tinggi. Menggunakan komputer untuk mengontrol sensor dapat menyesuaikan parameter dari jarak jauh dan mengumpulkan data frekuensi tinggi, yang cocok untuk integrasi sistem otomasi dan kebutuhan pemeriksaan kualitas.
2. Metode utama pengendalian komputer
Kontrol komunikasi serial:Protokol komunikasi RS-232 atau RS-485 sering digunakan, dan komputer bertukar data dan perintah dengan sensor melalui koneksi ini.
Koneksi USB atau Ethernet:Beberapa sensor OMRON mendukung koneksi USB atau Ethernet untuk transfer data cepat dan kendali jarak jauh.
Perangkat lunak khusus:Perangkat lunak yang disediakan OMRON memungkinkan pengguna untuk mengatur parameter sensor, membaca data dan memantau secara real time di komputer.
Kontrol program khusus:Anda dapat menggunakan Python, LabVIEW, C++ dan bahasa pemrograman lainnya untuk mengembangkan antarmuka kontrol dan mengoperasikan sensor melalui SDK atau API.
3. Keuntungan pengendalian komputer
Ekstraksi data presisi tinggi:Data pengukuran dalam jumlah besar dapat dikumpulkan lebih cepat melalui komputer dan dianalisis secara real time.
Pemantauan dan kontrol jarak jauh:Operator dapat memantau perubahan data dari jarak jauh dan menyesuaikan parameter pengukuran sesuai situasi.
Perekaman dan pelacakan data:Data secara otomatis disimpan di komputer untuk memfasilitasi analisis kualitas atau optimalisasi proses selanjutnya.
Koneksi multi-perangkat:Memungkinkan beberapa sensor dihubungkan ke komputer secara bersamaan untuk pengukuran dan kontrol yang sinkron.
Pengukuran presisi:Digunakan untuk pengukuran perpindahan dan ketebalan komponen elektronik dan bagian mekanis.
Deteksi otomatis:Pantau perubahan bentuk dan ukuran item di lini produksi, serta deteksi dan sortir produk yang tidak memenuhi syarat secara real time.
Litbang dan Eksperimen:Ini digunakan untuk pengujian properti material di laboratorium untuk mencapai pengukuran perpindahan dan deformasi yang sangat akurat.
5. Contoh program kontrol sederhana (Python)
Berikut ini adalah contoh program Python untuk memperoleh data dari sensor perpindahan laser OMRON melalui komunikasi serial.
impor serial
waktu impor
# Atur koneksi port serial
ser = serial.Serial('COM4', 9600, batas waktu=1)
#Kirim perintah untuk memulai pengukuran
def mulai_pengukuran():
ser.write(b'MULAI\n')
waktu.tidur(1)
#Baca data pengukuran
def baca_data():
ser.write(b'BACA\n')
data = ser.readline().decode().strip()
print("Data pengukuran :",data)
mengembalikan data
# Petunjuk untuk menghentikan pengukuran
def stop_measurement():
ser.write(b'STOP\n')
waktu.tidur(1)
# Contoh penggunaan
mulai_pengukuran()
time.sleep(2) # Tunggu hingga data pengukuran stabil
untuk _ dalam rentang(5):
read_data() # Membaca data 5 kali
waktu.tidur(0,5)
berhenti_pengukuran()
ser.tutup()
menjelaskan
Dalam contoh program ini,start_measurement()digunakan untuk memulai pengukuran,read_data()Baca nilai pengukuran arus dari sensor sambilstop_measurement()Kemudian berhenti mengukur. Melalui perintah komunikasi serial, komputer terus mengumpulkan data pengukuran dan menganalisisnya.
motor NSK
1. Metode pengendalian motor NSK
Motor NSK banyak digunakan dalam otomasi industri, dengan berbagai metode pengendalian yang bervariasi menurut jenis motor dan skenario aplikasi. Berikut ini adalah metode pengendalian yang umum:
Kontrol loop terbuka:Ia menggunakan kontrol tegangan atau arus dasar untuk menjalankan motor tanpa bergantung pada sistem umpan balik. Cocok untuk aplikasi sederhana atau skenario dimana bebannya sedikit berubah.
Kontrol loop tertutup:Melalui putaran umpan balik, kecepatan dan posisi motor terus dipantau untuk meningkatkan akurasi. Cocok untuk aplikasi yang memerlukan penentuan posisi dan kontrol kecepatan yang tepat.
Pengendalian vektor:Menggunakan teknologi kontrol vektor untuk mencapai kontrol torsi dan kecepatan yang presisi, sangat cocok untuk aplikasi yang memerlukan presisi tinggi dan respons dinamis tinggi.
Kontrol servo:Menggabungkan beberapa kontrol posisi, kecepatan dan arus, ia memiliki karakteristik presisi tinggi dan respons cepat, dan cocok untuk peralatan otomasi kelas atas.
2. Keunggulan motor NSK
Motor NSK menawarkan banyak keunggulan dalam hal presisi, efisiensi, dan stabilitas, menjadikannya pilihan populer dalam otomasi industri:
Presisi tinggi:Motor NSK memiliki akurasi posisi yang sangat baik, terutama saat menggunakan kontrol loop tertutup atau servo, mencapai akurasi tingkat mikron.
Kebisingan rendah dan getaran rendah:Desain struktural yang canggih dapat secara efektif mengurangi kebisingan dan getaran selama pengoperasian, sehingga cocok untuk pemandangan yang sensitif terhadap suara.
Efisiensi tinggi dan hemat energi:Motor memiliki efisiensi konversi energi yang tinggi, mengurangi kehilangan energi, dan memenuhi kebutuhan industri modern akan konservasi energi.
Stabil dan dapat diandalkan:Struktur desainnya kokoh, mudah beradaptasi dengan lingkungan kerja yang keras, dan memiliki stabilitas pengoperasian jangka panjang.
3. Penerapan motor NSK
Motor NSK memiliki beragam aplikasi, mencakup manufaktur otomatis, permesinan presisi, dan bidang lainnya:
Peralatan mesin CNC:Ini digunakan dalam kontrol sistem spindel dan umpan pada peralatan mesin CNC untuk memberikan posisi pemrosesan presisi tinggi.
Robotika:Digunakan untuk kontrol bersama robot industri untuk memastikan pelaksanaan tindakan yang lancar dan presisi tinggi.
Manufaktur semikonduktor:Digunakan dalam peralatan pemrosesan dan penanganan wafer untuk memenuhi persyaratan kontrol ultra-presisi.
Peralatan medis:Misalnya, pada peralatan gigi dan peralatan pencitraan, ini memberikan kontrol pengoperasian yang senyap dan presisi.
Jalur produksi otomatis:Digunakan untuk penanganan material dan kontrol posisi di jalur produksi otomatis seperti makanan dan pengemasan.
4. Contoh program kendali sederhana
Berikut contoh program sederhana penggunaan PLC untuk mengendalikan motor NSK:
// Contoh program PLC
// Nyalakan motor, atur kecepatan dan akselerasi, dan kendalikan status berjalan
MULAI:
MOV #1000, D100 //Atur kecepatan target motor ke 1000 RPM
MOV #200, D101 // Atur akselerasi ke 200 RPM/s
MOV #1, M200 // Menghidupkan motor
TUNGGU 500 // tunggu 500 milidetik
MOV #0, M200 // Hentikan motor
BERHENTI
menjelaskan
Dalam contoh program ini, PLC menggunakan instruksi sederhana untuk mengendalikan motor NSK, menetapkan target kecepatan dan percepatan, serta menghidupkan dan mematikan motor. Proses pengendalian seperti ini cocok untuk kebutuhan pengendalian otomasi sederhana.
Kontrol terminal komputer motor NSK
1. Tinjauan pengendalian komputer
Kontrol motor NSK di sisi komputer biasanya dicapai melalui perangkat lunak kontrol dan protokol komunikasi, yang dapat secara akurat menyesuaikan kecepatan, posisi, dan mode pengoperasian motor. Metode kontrol ini cocok untuk aplikasi dan skenario industri presisi tinggi yang memerlukan kendali jarak jauh.
2. Metode utama pengendalian komputer
Kontrol komunikasi serial:Menggunakan RS-232, RS-485 atau USB untuk komunikasi, komputer dapat langsung mengirimkan instruksi atau pengaturan parameter ke motor.
Protokol EtherCAT atau Modbus:Umum pada peralatan otomasi, ini memungkinkan komputer mengirimkan instruksi dengan cepat ke beberapa motor untuk mencapai operasi sinkron.
Perangkat lunak kontrol khusus:Perangkat lunak kontrol yang disediakan oleh NSK memungkinkan pengguna untuk mengatur parameter, memantau data dan mendiagnosis kesalahan pada motor di komputer.
Pengendalian lingkungan pengembangan:Antarmuka kontrol dapat dikembangkan menggunakan bahasa pemrograman seperti Python dan C++, dan motor dapat dikontrol langsung melalui SDK atau API.
3. Keuntungan pengendalian komputer
Kontrol presisi tinggi:Terminal komputer dapat secara akurat menyesuaikan parameter pengoperasian motor, seperti akselerasi, deselerasi, kecepatan putaran, dll., sehingga mencapai akurasi kontrol tingkat mikron.
Operasi jarak jauh:Memungkinkan operator mengendalikan dan memantau motor dari jarak jauh, memfasilitasi manajemen jalur produksi terpusat dan diagnosis kesalahan cepat.
Pencatatan dan analisis data:Data operasi dapat disimpan di komputer untuk analisis dan optimasi lebih lanjut.
Kontrol kolaboratif multi-sumbu:Mewujudkan kontrol sinkron beberapa motor melalui komputer untuk aplikasi seperti lengan robot yang perlu bekerja sama.
4. Contoh penerapan pengendalian komputer
Peralatan pemrosesan presisi:Misalnya, peralatan mesin CNC dapat mengontrol sinkronisasi spindel dan motor umpan untuk memastikan akurasi pemesinan.
Jalur perakitan otomatis:Memungkinkan beberapa motor NSK bekerja sama untuk mengontrol setiap langkah lini produksi.
Otomatisasi laboratorium:Dalam ilmu kehidupan, motor NSK digunakan untuk pergerakan dan pengukuran sampel secara presisi.
5. Contoh program kontrol sederhana (Python)
Berikut ini contoh penggunaan Python untuk mengendalikan motor NSK melalui komunikasi serial.
impor serial
waktu impor
# Atur koneksi port serial
ser = serial.Serial('COM3', 9600, batas waktu=1)
# Kirim perintah untuk menghidupkan motor
def start_motor():
ser.write(b'MULAI\n')
waktu.tidur(1)
# Atur perintah kecepatan
def set_speed(kecepatan):
perintah = f'SPEED {kecepatan}\n'
ser.write(perintah.encode())
waktu.tidur(1)
# Perintah untuk menghentikan motor
def stop_motor():
ser.write(b'STOP\n')
waktu.tidur(1)
# Contoh penggunaan
mulai_motor()
set_kecepatan(1000)
time.sleep(5) # Biarkan motor berjalan selama 5 detik
berhenti_motor()
ser.tutup()
menjelaskan
Dalam contoh ini, komputer terhubung ke motor NSK melalui program Python dan port komunikasi serial.start_motor()Digunakan untuk menghidupkan motor,set_speed()Mengatur kecepatan lari motor, danstop_motor()Berfungsi untuk menghentikan motor. Contoh ini cocok untuk kebutuhan pengujian dan kontrol sederhana.
Kartu kendali gerak
Definisi dan fungsi
Kartu Kendali Gerak merupakan perangkat keras kendali khusus yang digunakan untuk mengendalikan motor servo atau motor stepper. Ini sering digunakan pada robot, peralatan otomasi, peralatan mesin CNC, peralatan semikonduktor, dll. Fungsi utamanya meliputi kontrol posisi, kontrol kecepatan, operasi interpolasi, kontrol sinkron, dll.
Metode pengendalian umum
Kontrol posisi:Kontrol motor secara tepat untuk berpindah ke posisi yang ditentukan.
Kontrol kecepatan:Sesuaikan kecepatan pengoperasian motor agar sesuai dengan kebutuhan aplikasi.
Pergerakan titik ke titik:Bergerak cepat dari satu titik ke titik lainnya.
Interpolasi linier/melingkar:Menghasilkan lintasan yang mulus dalam aplikasi multi-sumbu.
Kontrol sinkron:Mulai dan hentikan beberapa sumbu secara bersamaan untuk menjaga koordinasi.
Perbedaan dari PLC
PLC berfokus pada kontrol logika dan pemrosesan I/O, dan cocok untuk kontrol umum.
Kartu kendali gerak berfokus pada kendali gerak presisi tinggi dan kecepatan tinggi serta cocok untuk mesin presisi.
Jenis antarmuka
PCI / PCIe:Dipasang di dalam komputer industri, latensi rendah.
EtherCAT:Bus berkecepatan tinggi mendukung banyak sumbu dan memiliki kinerja real-time yang baik.
CANopen、MECHATROLINK、SSCNET:Protokol yang umum digunakan di industri.
Ruang lingkup aplikasi
Jalur produksi otomatis
Pusat permesinan CNC
pencetak 3D
Lengan robot
Platform deteksi dan penentuan posisi
Perbandingan merek-merek besar (diurutkan berdasarkan pangsa pasar)
merek
Negara
Jenis antarmuka
Jumlah maksimum sumbu kontrol
fitur
Pangsa pasar global (perkiraan)
Siemens
Jerman
PROFINET / EtherCAT
128 sumbu atau lebih
Integrasikan PLC dan HMI, banyak digunakan di pabrik-pabrik Eropa
sekitar 15%
Mitsubishi (Mitsubishi Listrik)
Jepang
CC-Link / SSCNET
multi-sumbu
PLC dan driver internal terintegrasi dengan baik dan memiliki pangsa pasar yang tinggi di Asia-Pasifik
sekitar 13%
Beckhoff
Jerman
EtherCAT
Sangat terukur
Memimpin bidang kontrol berbasis PC, mendukung TwinCAT
sekitar 12%
Yaskawa (Yaskawa Listrik)
Jepang
MECHATROLINK / EtherCAT
multi-sumbu
Integrasi lengkap motor, servo dan kontrol, stabilitas tinggi
sekitar 10%
Delta
Taiwan
EtherCAT / CANopen
Lebih dari 32 sumbu
Integrasi luar biasa dengan drive internal, hemat biaya
sekitar 8%
Advantech (Advantech)
Taiwan
PCI / PCIe / EtherCAT
64 sumbu
Kemampuan integrasi industri yang tinggi, mendukung banyak modul I/O
sekitar 7%
Syntec (Teknologi Generasi Baru)
Taiwan
EtherCAT / PCI
64 sumbu
Terutama berfokus pada aplikasi peralatan mesin, mendukung integrasi CNC dan HMI
sekitar 6%
sinar timah
Cina
EtherCAT / CANopen / RS485
32 sumbu
Harga kompetitif, banyak digunakan pada peralatan kelas menengah hingga bawah
sekitar 5%
PMAC (anak perusahaan Delta)
Amerika Serikat
Ethernet / PCIe
128 sumbu atau lebih
Interpolasi tingkat tinggi dan kontrol sinkronisasi kecepatan tinggi
sekitar 5%
Haiwin
Taiwan
EtherCAT / Modbus
multi-sumbu
Integrasi luar biasa dengan modul linier dan solusi keseluruhan driver
sekitar 4%
Galil Motion Control
Amerika Serikat
Ethernet / PCI / USB
64 sumbu atau lebih
Sejarah panjang, kontrol presisi, ramah pengembangan
sekitar 3%
NSK
Jepang
EtherCAT / bus khusus
multi-sumbu
Integrasi yang sangat baik dengan motor penggerak langsung dan modul linier kami
sekitar 2%
Komentar
Data pangsa pasar berasal dari laporan riset pasar dan analisis industri dalam beberapa tahun terakhir dan hanya untuk referensi.
Proporsi penerapan sebenarnya dapat bervariasi tergantung pada wilayah, industri, dan kebutuhan teknologi.
EtherCAT
Konsep dasar
EtherCAT (Ethernet for Control Automation Technology) adalah protokol komunikasi industri real-time berdasarkan teknologi Ethernet, yang dikembangkan oleh Beckhoff Automation di Jerman. Ini memiliki karakteristik kecepatan tinggi, penundaan rendah, sinkronisasi tinggi, dll., dan merupakan sistem bus yang banyak digunakan dalam otomasi industri modern dan kontrol gerak.
Fitur utama
Performa instan yang bagus:Ini dapat mencapai penundaan komunikasi tingkat mikrodetik dan cocok untuk kontrol sinkron multi-sumbu presisi tinggi.
Mendukung sejumlah besar budak:Hingga ratusan stasiun budak dapat dihubungkan ke satu segmen jaringan.
Mendukung Jam Terdistribusi:Akurasi sinkronisasi kurang dari 1 mikrodetik dapat dicapai.
Efisiensi paket tinggi:Paket stasiun master dapat "diteruskan dan diproses" di setiap stasiun budak tanpa menunggu tanggapan dikirim kembali.
Fleksibilitas topologi jaringan:Mendukung topologi linier, pohon, bintang, cincin, dan lainnya.
Contoh topologi
Topologi linier:Konfigurasi yang paling umum adalah stasiun master→stasiun budak 1→stasiun budak 2→stasiun budak 3…
Topologi dering:Dilengkapi dengan fungsi perlindungan redundan, komunikasi dapat tetap terjaga meskipun perangkat perantara terputus.
Area aplikasi
Kontrol Gerakan
robot industri
Modul I/O digital
Penggerak servo dan motor stepper
Sensor dan sistem pengukuran
Merek umum yang mendukung EtherCAT
Beckhoff
Delta
Yaskawa (Yaskawa Listrik)
Advantech (Advantech)
sinar timah
Syntec (generasi baru)
Haiwin
Perbandingan dengan komunikasi industri lainnya
protokol komunikasi
Menunda
sinkronisitas
kecepatan data
Dukungan topologi
EtherCAT
Sangat rendah (<100μs)
Tinggi (mendukung pencatatan jam kerja terdistribusi)
100 Mbps
Linier, pohon, melingkar
PROFINET
tengah
Sedang (membutuhkan modul sinkronisasi waktu)
100 Mbps
bintang, linier
CANopen
Tinggi (>1 mdtk)
Rendah
1 Mbps
Linier
MECHATROLINK-III
Rendah
Menengah ke tinggi
100 Mbps
Linier
Kesimpulan
Dengan karakteristik kecepatan tinggi dan sinkronisasi tinggi, EtherCAT telah menjadi protokol komunikasi pilihan untuk sistem otomasi modern berkinerja tinggi. Terutama dalam kontrol gerak multi-sumbu dan aplikasi kontrol real-time, posisinya tidak tergantikan.
Pengendali Motor Galil
Ringkasan
Galil adalah perusahaan Amerika yang mengkhususkan diri dalam pengembangan produk kontrol gerak berkinerja tinggi, menyediakan pengontrol motor multi-sumbu, kartu gerak, dan solusi kontrol tertanam. Pengendali motor Galil banyak digunakan dalam otomasi industri, peralatan medis, manufaktur semikonduktor, dan instrumentasi laboratorium.
Fitur produk
Kontrol multi-sumbu:Mendukung kontrol motor servo atau motor stepper dari 1 hingga 8 sumbu.
Berbagai antarmuka:Termasuk Ethernet, RS232, USB, CAN dan metode komunikasi lainnya.
Kontrol instan:Pengontrol DSP internal dengan respons cepat untuk aplikasi presisi tinggi.
Dapat diprogram:DMC (Bahasa Kontrol Gerakan) bawaan mendukung logika kompleks dan urutan gerakan.
Kontrol loop tertutup:Mendukung umpan balik encoder, penyesuaian PID, dan fungsi penyesuaian parameter otomatis.
Tipe kontrol
Kontrol motor servo:Mendukung berbagai encoder dan loop pembaruan frekuensi tinggi dengan akurasi tinggi.
Kontrol motor stepper:Cocok untuk aplikasi pemosisian berbiaya rendah dan resolusi tinggi.
Kontrol hibrida:Satu pengontrol dapat mengontrol motor servo dan stepper.
Seri produk umum
Seri DMC-40x0:Pengontrol Ethernet multi-sumbu berkinerja tinggi, mendukung hingga 8 sumbu.
Seri DMC-3x01x:Pengontrol kompak yang berdiri sendiri dengan USB dan antarmuka serial.
Seri RIO:Perangkat I/O jarak jauh, mendukung ekspansi I/O dan fungsi PLC.
Seri AMP:Pengontrol driver motor bawaan menghemat ruang dan kabel.
Area aplikasi
Jalur produksi otomatis
Pemotongan laser dan permesinan CNC
pemindai pencitraan medis
Peralatan otomasi laboratorium
Lengan robot dan platform pemosisian presisi
keuntungan
Akurasi kontrolnya tinggi dan mendukung pemosisian sub-mikron.
Stabilitas dan keandalan yang sangat baik, cocok untuk pengoperasian jangka panjang.
Alat pengembangan yang kaya dan dukungan teknis.
Elastisitas tinggi, cocok untuk beragam aplikasi.
Perangkat lunak dan pengembangan
GalilTools:Konfigurasi grafis resmi dan perangkat lunak debugging.
Bahasa DMC:Bahasa kontrol gerak yang ringkas dan efisien untuk menulis program kontrol.
Dukungan API:Menyediakan antarmuka pengembangan seperti C/C++, .NET, LabVIEW, dan Python.
Saran belanja
Pilih produk yang sesuai berdasarkan jumlah sumbu dan jenis kontrol.
Pertimbangkan apakah Anda memerlukan driver internal atau driver eksternal.
Konfirmasikan kompatibilitas antarmuka komunikasi dengan peralatan yang ada.
Evaluasi skalabilitas masa depan dan kebutuhan I/O.
Antarmuka Mesin Manusia (HMI)
definisi
Human-Machine Interface (HMI) adalah platform interaktif antara operator dan mesin atau sistem otomasi. Hal ini memungkinkan pengguna untuk memantau, mengontrol dan mengatur peralatan industri atau proses produksi melalui antarmuka grafis, tombol, layar sentuh, dll.
Fungsi utama
Tampilan data waktu nyata
Kontrol perangkat dan input perintah
Perintah alarm dan rekaman acara
Pemantauan status sistem dan antarmuka operasi visual
Kueri data historis dan keluaran laporan
Skenario aplikasi
Lini produksi otomasi industri
Sistem Pengendalian Energi dan Utilitas
Transportasi dan Otomasi Bangunan
Mesin pengolah dan pengemasan makanan
Tipe umum
HMI tertanam (terpasang di mesin)
PC tipe HMI (menggunakan komputer industri)
Perangkat seluler HMI (melalui tablet atau ponsel)
keuntungan
Meningkatkan efisiensi dan keselamatan operasional
Sederhanakan proses kontrol dan pengaturan parameter
Respons kesalahan segera dan peringatan alarm
Meningkatkan pemahaman visual personel tentang peralatan
tantangan
Desain antarmuka harus sesuai dengan kebiasaan pengguna
Kompleksitas Integrasi dengan PLC dan SCADA
Perlu mencegah penyalahgunaan dan risiko keamanan informasi
Masalah kompatibilitas antara produsen peralatan yang berbeda
PLC
Apa itu PLC
PLC yang bernama lengkap Programmable Logic Controller ini merupakan sebuah perangkat elektronik digital yang dirancang khusus untuk lingkungan industri dan digunakan untuk mengontrol berbagai jenis mesin atau proses produksi secara otomatis.
Fungsi PLC
Kontrol logika: melakukan operasi logika, seperti gerbang AND, gerbang OR, gerbang NOT, dll.
Kontrol urutan: menjalankan kontrol urutan sesuai dengan program yang ditetapkan.
Penghitungan dan pengaturan waktu: menerapkan fungsi penghitung dan kontrol waktu.
Pemrosesan analog: memantau dan mengontrol sinyal analog, seperti suhu, tekanan, dll.
Struktur PLC
Central Processing Unit (CPU): Bertanggung jawab untuk melaksanakan program dan memproses data.
Memori: menyimpan program dan data pengoperasian.
Modul input/output: menerima sinyal eksternal dan mengontrol perangkat eksternal.
Catu daya: Menyediakan energi listrik yang dibutuhkan oleh seluruh sistem.
Ruang lingkup aplikasi PLC
PLC banyak digunakan di bidang manufaktur, jalur produksi otomatis, mesin dan peralatan, transportasi, manajemen energi, dan bidang lainnya. Misalnya:
Sistem kendali otomasi pabrik
kontrol lift
sistem lampu lalu lintas
Pemantauan dan pengelolaan energi
MITSUBISHI MELSEC PLC
PLC MELSEC Mitsubishi Electric
seri adalah pengontrol logika terprogram canggih untuk otomasi industri, yang mampu mengontrol dan mengelola berbagai peralatan secara efisien. Ini banyak digunakan di bidang manufaktur, manajemen energi, kontrol gedung, dan pengoperasian mesin dan peralatan otomatis.
1. Fitur utama MELSEC PLC
Desain modular: MELSEC PLC mendukung arsitektur modular, memungkinkan pengguna menambahkan modul I/O, modul komunikasi, dan modul perluasan fungsi sesuai kebutuhan untuk mengonfigurasi sistem secara fleksibel.
Kemampuan pemrosesan kecepatan tinggi: Dilengkapi dengan prosesor bertenaga dengan kemampuan pemrosesan berkecepatan tinggi untuk memastikan kontrol yang tepat dan cepat antar perangkat.
Stabil dan dapat diandalkan: Desain kokoh dengan anti-interferensi dan daya tahan yang sangat baik, cocok untuk bekerja di lingkungan yang keras.
Dukungan protokol komunikasi yang beragam: Mendukung berbagai protokol komunikasi, seperti Ethernet, CC-Link, dan MODBUS, untuk memfasilitasi integrasi dengan peralatan otomasi lainnya.
2. Seri utama MELSEC PLC
seri FX: Cocok untuk sistem otomasi kecil dan cocok untuk aplikasi sederhana.
seri L: Ini memiliki skalabilitas dan fleksibilitas dan cocok untuk sistem otomasi skala kecil dan menengah.
Seri Q: Untuk sistem berskala besar, ini memberikan kemampuan pemrosesan yang lebih kuat dan perluasan modular, serta cocok untuk aplikasi yang kompleks.
Seri iQ-R: Seri PLC kelas atas terbaru dengan kinerja dan keamanan lebih tinggi untuk aplikasi Industri 4.0 dan IoT.
3. Ruang lingkup aplikasi MELSEC PLC
Otomatisasi Manufaktur: Seperti kontrol yang tepat pada jalur perakitan dan peralatan pengemasan.
manajemen energi: Memantau dan mengendalikan fasilitas energi seperti pembangkit listrik dan gardu induk.
Kontrol peralatan mekanis: Cocok untuk kontrol otomatis berbagai mesin industri.
Manajemen gedung yang cerdas: Mengontrol sistem HVAC, pencahayaan dan keamanan untuk meningkatkan efisiensi operasional gedung.
4. Alat pemrograman MELSEC PLC
Mitsubishi MELSEC PLC menggunakan software pemrograman profesional seperti GX Works2 dan GX Works3, serta mendukung berbagai bahasa pemrograman, antara lain:
Diagram Tangga (LD)
Daftar Instruksi (IL)
Teks Terstruktur (ST)
Diagram Blok Fungsi (FBD)
Alat-alat ini menyediakan antarmuka pemrograman grafis yang intuitif dan perpustakaan fungsi yang kaya untuk membantu pengguna menyelesaikan pengembangan program otomatis dengan cepat.
5. Keunggulan Mitsubishi MELSEC PLC
Efisiensi tinggi: Dengan pemrosesan yang cepat, latensi rendah, dan kemampuan multitasking, produk ini cocok untuk aplikasi otomasi industri dengan permintaan tinggi.
Skalabilitas yang fleksibel: Desain modular memungkinkan sistem dikonfigurasikan dan diperluas secara fleksibel sesuai kebutuhan.
Stabilitas yang kuat: Mendukung pengoperasian aplikasi industri yang berkelanjutan dan cocok untuk pekerjaan jangka panjang di lingkungan yang keras.
Seri Mitsubishi MELSEC PLC efisien, stabil dan fleksibel, mampu memenuhi berbagai kebutuhan otomasi dan merupakan pilihan yang dapat diandalkan di bidang otomasi industri.
Protokol dan contoh komunikasi antara MELSEC PLC dan komputer
Mitsubishi MELSEC PLC mendukung beberapa protokol komunikasi untuk berkomunikasi dengan komputer atau perangkat lain. Protokol ini memungkinkan PLC untuk bertukar data dan mengirimkan perintah kontrol dengan jaringan industri, sistem SCADA, dan komputer pemantauan.
1. Protokol komunikasi umum MELSEC PLC
Protokol MC (Protokol Komunikasi MELSEC): Protokol eksklusif MELSEC menyediakan transmisi data antara komputer dan PLC.
MODBUS: Protokol standar yang banyak digunakan dalam otomasi industri, mendukung mode RTU dan TCP untuk memfasilitasi komunikasi antara PLC dan perangkat atau perangkat lunak lain.
CC-Link IE: Protokol berkinerja tinggi berdasarkan Ethernet untuk transmisi data latensi rendah dan efisien, cocok untuk aplikasi kontrol waktu nyata.
Ethernet/IP: Protokol Ethernet industri umum yang cocok untuk interkoneksi peralatan multi-vendor.
2. Contoh komunikasi antara MELSEC PLC dan komputer
Contoh 1: Komunikasi TCP/IP di bawah protokol MC
Dalam contoh ini, komputer menggunakan TCP/IP untuk berkomunikasi dengan PLC MELSEC melalui protokol MC dan membaca register data di PLC.
# Kode contoh Python, menggunakan rangkaian soket untuk berkomunikasi dengan MELSEC PLC
soket impor
# Pengaturan IP dan Port PLC
plc_ip = '192.168.1.100'
plc_port = 5000
# Buat koneksi soket
client_socket = soket.socket(socket.AF_INET, soket.SOCK_STREAM)
client_socket.connect((plc_ip, plc_port))
# Permintaan baca protokol MC (baca register D100)
perintah_baca = b'\x50\x00\x00\xFF\xFF\x03\x00\x0C\x00\x10\x00\x01\x04\x00\x00\x64\x00\xA8\x00\x01\x00'
# Kirim permintaan
client_socket.sendall(read_command)
#Menerima tanggapan
respons = client_socket.recv(1024)
print("Respon PLC :",respon)
# Tutup koneksi
klien_socket.close()
Contoh 2: Komunikasi RTU di bawah protokol MODBUS
Contoh ini menggunakan PythonpymodbusLibrary, berkomunikasi dengan MELSEC PLC melalui MODBUS RTU, dan membaca data register yang terletak di 40001.
# Contoh kode Python, menggunakan pymodbus untuk berkomunikasi melalui MODBUS RTU
dari pymodbus.client.sync impor ModbusSerialClient
#Mengatur parameter port serial
klien = ModbusSerialClient(metode='rtu', port='/dev/ttyUSB0', baudrate=9600, batas waktu=1)
# Hubungkan ke PLC
klien.koneksi()
# Baca data register di alamat 40001
hasil = klien.read_holding_registers(40001, 1, unit=1)
print("Daftar data :",hasil.register)
# Tutup koneksi
klien.tutup()
3. Skenario penerapan komunikasi MELSEC PLC
Pemantauan sistem SCADA: Terhubung ke sistem SCADA melalui protokol MC dan MODBUS untuk pemantauan peralatan dan pengumpulan data.
Kontrol perangkat dan pertukaran data:Bertukar data dengan sistem kontrol lain atau komputer melalui protokol Ethernet/IP untuk mencapai kontrol sinkron antara peralatan otomasi industri.
Pemantauan dan pemeliharaan jarak jauh: Gunakan komunikasi TCP/IP untuk mewujudkan operasi jarak jauh dan pemantauan data PLC.
Melalui dukungan protokol yang beragam, MELSEC PLC dapat diterapkan secara fleksibel pada berbagai skenario industri untuk mencapai komunikasi dan pertukaran data yang efisien dan stabil.
PLC Listrik Shihlin
PLC Listrik Shihlin
Programmable Logic Controller (PLC) Shihlin Electric adalah perangkat kontrol industri yang dirancang khusus untuk digunakan dalam sistem kontrol otomasi. PLC
Menggunakan logika digital untuk kontrol, ia dapat melakukan beragam operasi industri berdasarkan pemrograman, seperti kontrol mesin, manajemen proses manufaktur, pemantauan, dan pengumpulan data.
Karakteristik PLC Listrik Shihlin
PLC Shihlin Electric stabil, efisien dan fleksibel, serta cocok untuk berbagai skenario industri. Berikut fitur utamanya:
Stabilitas tinggi:Desainnya kokoh dan tahan lama serta tahan terhadap lingkungan industri yang keras seperti suhu tinggi, kelembapan, atau getaran.
Desain modular:Menyediakan berbagai modul ekspansi, termasuk modul input/output, modul komunikasi, dll., yang dapat dikonfigurasi secara fleksibel sesuai kebutuhan.
Pemrogramannya mudah:Ini mendukung berbagai bahasa pemrograman dan dapat dengan cepat dikonfigurasi dan disesuaikan menggunakan perangkat lunak pemrograman khusus Shilin Electric.
Keterampilan komunikasi yang kuat:Mendukung berbagai protokol komunikasi, seperti MODBUS, RS-485, Ethernet, dll., untuk memfasilitasi transmisi data dengan perangkat lain.
Penerapan PLC Listrik Shilin
PLC Shihlin Electric banyak digunakan dalam berbagai skenario otomasi, termasuk:
manufaktur:Kontrol jalur produksi otomatis dan kelola peralatan seperti lengan robot dan ban berjalan.
Sistem kendali bangunan:Digunakan untuk otomatisasi bangunan, pengendalian pencahayaan, AC, sistem pemantauan, dll.
Manajemen daya:Memantau dan mengontrol sistem tenaga seperti genset dan jaringan distribusi.
Pengolahan air:Mengontrol pompa air, katup, dan peralatan lain untuk pengolahan air keran dan sistem pengolahan limbah.
sebagai kesimpulan
Shihlin Electric PLC memiliki stabilitas dan fleksibilitas tinggi serta cocok untuk beragam kebutuhan otomasi industri. Dengan perkembangan teknologi, PLC telah menjadi peralatan inti kontrol otomasi industri modern, membantu semua lapisan masyarakat meningkatkan efisiensi produksi dan akurasi kontrol.
LabVIEW
Apa itu LabVIEW?
LabVIEW(Laboratorium Virtual Instrument Engineering Workbench) adalah perangkat lunak yang dikembangkan oleh National Instruments
Lingkungan pemrograman grafis yang dikembangkan oleh perusahaan terutama digunakan dalam pengukuran, akuisisi data, sistem kontrol, dan pengujian otomatis. LabVIEW menggunakan antarmuka pemrograman visual untuk memungkinkan pengguna merancang program menggunakan "blok fungsi" grafis tanpa menulis kode tradisional.
Fitur LabVIEW
Pendekatan pemrograman grafis LabVIEW membuatnya sangat cocok untuk bidang teknik dan ilmiah yang memerlukan pengembangan dan pengujian prototipe secara cepat. Berikut adalah beberapa fitur utama LabVIEW:
Pemrograman grafis:LabVIEW mengadopsi metode aliran data pemrograman grafis, memungkinkan pengguna merancang aliran program secara intuitif.
Pengambilan data bawaan:LabVIEW mendukung berbagai perangkat keras akuisisi data untuk memfasilitasi pengumpulan dan pemrosesan data eksperimen secara langsung.
Perpustakaan fungsi yang kaya:LabVIEW menyediakan sejumlah besar fungsi siap pakai untuk pemrosesan sinyal, analisis, kontrol, dan visualisasi data.
Dukungan lintas platform:LabVIEW berjalan pada sistem Windows, macOS, dan Linux dan mendukung berbagai perangkat keras.
Ruang lingkup aplikasi LabVIEW
Pengujian otomatis:LabVIEW sering digunakan untuk merancang dan menjalankan sistem pengujian otomatis untuk meningkatkan efisiensi pengujian dan akurasi data.
Kontrol mesin:LabVIEW dapat digunakan untuk pemantauan dan pengendalian mesin dan peralatan secara real-time, seperti otomatisasi pabrik dan kontrol lengan robot.
Akuisisi dan analisis data:LabVIEW mendukung berbagai perangkat keras akuisisi data dan dapat dengan cepat mengumpulkan dan menganalisis berbagai data eksperimen dan teknik.
Riset ilmiah:LabVIEW dapat digunakan untuk pemrosesan cepat dan analisis data eksperimen, dan umumnya digunakan dalam bidang ilmiah seperti fisika, kimia, dan biologi.
Kelebihan dan Tantangan LabVIEW
Keunggulan LabVIEW terletak pada metode pemrograman grafisnya yang sederhana dan kaya akan alat siap pakai, yang menjadikannya unggul dalam pengembangan cepat dan pembuatan prototipe. Namun, karena kurva pembelajaran yang tinggi dan harga versi komersial yang mahal, usaha kecil dan menengah serta pemula mungkin menghadapi tantangan dalam hal biaya dan ambang batas penggunaan.
sistem tertanam
Definisi dan karakteristik
Sistem tertanam adalah sistem komputasi khusus yang menggabungkan perangkat keras dan perangkat lunak untuk melakukan tugas tertentu. Dibandingkan dengan komputer serba guna, komputer ini memiliki karakteristik sebagai berikut:
Sangat terintegrasi: Perangkat keras dan perangkat lunak terintegrasi erat dan dioptimalkan untuk aplikasi tertentu.
Sumber daya terbatas: biasanya dibatasi oleh memori, daya pemrosesan, dan konsumsi energi.
Keandalan tinggi: Desain harus memastikan bahwa sistem stabil dan andal dalam pengoperasian jangka panjang.
Area aplikasi
Sistem tertanam banyak digunakan di bidang berikut:
Produk elektronik rumah tangga: seperti smart TV, mesin cuci, oven microwave, dll.
Elektronik otomotif: seperti sistem pengereman anti-lock (ABS), unit kontrol mesin (ECU).
Peralatan medis: seperti pengatur ritme jantung dan peralatan pemantauan medis.
Kontrol industri: seperti lengan robot dan pengontrol otomasi industri.
Peralatan komunikasi: seperti router, switch, dan smartphone.
komponen
Sistem tertanam terutama terdiri dari bagian-bagian berikut:
Mikroprosesor atau mikrokontroler: Bertanggung jawab atas operasi pemrosesan dan pelaksanaan instruksi.
Memori: termasuk memori flash (Flash) dan memori akses acak (RAM).
Antarmuka input/output: digunakan untuk menerima dan mengirimkan sinyal, seperti tombol, layar, atau sensor.
Perangkat Lunak: mencakup firmware dan aplikasi yang digunakan untuk mengontrol fungsi sistem.
Tren perkembangan masa depan
Sistem tertanam akan berkembang ke arah berikut di masa depan:
Kombinasi kecerdasan buatan dan pembelajaran mesin memungkinkan aplikasi yang lebih cerdas.
Popularitas Internet of Things (IoT) telah meningkatkan konektivitas antar perangkat.
Desain konsumsi daya rendah dan peningkatan efisiensi energi lebih lanjut.
Promosi perangkat lunak dan perangkat keras sumber terbuka menurunkan ambang batas pengembangan.
Platform pengembangan umum untuk sistem tertanam
Platform Mikrokontroler (MCU).
Mikrokontroler merupakan salah satu inti dari sistem tertanam. Platform pengembangan umum meliputi:
Arduino:Platform pengembangan tingkat awal yang mendukung berbagai sensor dan modul.
STM32:Berdasarkan inti ARM Cortex-M, cocok untuk aplikasi berkinerja tinggi.
TI MSP430:Platform mikrokontroler berfokus pada aplikasi berdaya rendah.
MCS-51:Komputer mikro chip tunggal 8-bit. Diantaranya, 8051 telah populer selama bertahun-tahun.
Platform Linux yang tertanam
Menggunakan sistem Linux sebagai platform tertanam dari sistem operasi, pilihan umum adalah:
Raspberry Pi:Banyak digunakan dalam pendidikan dan pembuatan prototipe cepat.
BeagleBone:Cocok untuk aplikasi industri dan menyediakan antarmuka I/O yang kaya.
Intel NUC:Cocok untuk aplikasi tertanam berkinerja tinggi.
Platform RTOS (sistem operasi waktu nyata).
Sistem operasi real-time sering digunakan pada aplikasi-aplikasi yang memerlukan kinerja real-time tinggi. Platform utama meliputi:
FreeRTOS:Open source dan ringan, cocok untuk sistem dengan sumber daya terbatas.
Zephyr OS:Dirancang khusus untuk Internet of Things dan mendukung berbagai arsitektur perangkat keras.
VxWorks:RTOS kelas industri, digunakan di bidang kedirgantaraan dan medis.
Platform pengembangan khusus
Platform pengembangan tertanam khusus aplikasi meliputi:
ESP32:Fungsi Wi-Fi dan Bluetooth bawaan, cocok untuk aplikasi IoT.
NVIDIA Jetson:Platform berkinerja tinggi yang berfokus pada AI dan pemrosesan gambar.
Texas Instruments LaunchPad:Mendukung berbagai modul, cocok untuk sistem kontrol analog dan digital.
Alat kolaborasi perangkat lunak dan perangkat keras
Saat mengembangkan sistem tertanam, Anda biasanya memerlukan dukungan alat-alat berikut:
IDEs:Seperti Keil, Eclipse, Kode Visual Studio.
Alat debug:Seperti alat JTAG, SWD (serial wire debugging).
Emulator dan mesin virtual:Misalnya, QEMU digunakan untuk mensimulasikan lingkungan perangkat keras.
Arduino
Arduino adalah platform perangkat keras dan perangkat lunak open source yang cocok untuk pemula dan pengembang profesional untuk membuat berbagai proyek elektronik.
perangkat keras Arduino
Perangkat keras Arduino terdiri dari mikrokontroler (seperti ATmega328, ESP32, dll.) dan berbagai antarmuka I/O untuk menghubungkan sensor, aktuator, dan komponen elektronik lainnya.
Papan Arduino umum
Arduino Uno - Papan starter yang paling umum digunakan, cocok untuk pemula.
Arduino Nano - Papan kecil yang cocok untuk proyek dengan ruang terbatas.
Arduino Mega - memiliki lebih banyak antarmuka I/O dan cocok untuk proyek besar.
ESP8266 / ESP32 - Mendukung Wi-Fi dan Bluetooth, cocok untuk aplikasi Internet of Things (IoT).
Perangkat lunak Arduino (IDE)
Arduino menggunakan Arduino IDE untuk menulis dan mengunggah kode. Kode program ditulis dalam sintaks C/C++ dan memiliki banyak perpustakaan yang nyaman.
Instal Arduino IDE dan mulai.
Pilih jenis papan yang benar (misalnya Arduino Uno).
Tulis kodenya dan unggah ke papan Arduino.
Aplikasi Arduino
Arduino dapat digunakan di banyak bidang seperti otomatisasi, IoT, robotika, instalasi musik, pemantauan pertanian, dll.
Sistem Irigasi Otomatis: Gunakan Arduino untuk mengontrol pompa air agar menyiram secara otomatis berdasarkan sensor kelembaban tanah.
Kontrol cerdas rumah: seperti kontrol pencahayaan cerdas, pemantauan keamanan, dll.
Pemantauan lingkungan: Pantau suhu, kelembapan, PM2.5, dan data lainnya melalui sensor.
Kelebihan Arduino
Platform Arduino memiliki kelebihan yaitu mudah dipelajari, berbiaya rendah, dan kaya akan dukungan komunitas, sehingga memudahkan pemula untuk memulai dan pengembang profesional untuk melakukan pengembangan lebih dalam.
penganalisa logika
Pengenalan peralatan
Penganalisis logika adalah instrumen uji elektronik yang digunakan untuk menangkap dan menganalisis perilaku sinyal digital. Ini dapat membantu para insinyur mendiagnosis masalah sirkuit digital, memeriksa waktu sinyal dan status logika, dan cocok untuk pengembangan dan pemecahan masalah perangkat keras.
Prinsip kerja
Penganalisis logika terhubung ke sirkuit digital melalui probe multi-saluran dan mencatat perubahan sinyal digital. Perangkat akan menangkap status sinyal sesuai dengan kondisi waktu yang ditetapkan dan mengubah data menjadi diagram waktu atau tabel keadaan logika yang mudah dipahami.
Fungsi utama
Analisis sinyal multi-saluran: beberapa rangkaian sinyal digital dapat dipantau secara bersamaan.
Analisis waktu: Periksa hubungan waktu antara sinyal dan identifikasi masalah waktu.
Pengaturan kondisi pemicu: Mulai pengambilan data berdasarkan kondisi tertentu (seperti perubahan level sinyal tinggi dan rendah).
Penyimpanan dan pemutaran data: merekam data sinyal untuk analisis selanjutnya.
Skenario aplikasi
Penganalisis logika banyak digunakan dalam desain sirkuit digital, pengembangan sistem tertanam, analisis protokol komunikasi, dan bidang lainnya. Ini sangat cocok untuk mendeteksi kesalahan waktu sinyal, memverifikasi protokol komunikasi, dan men-debug sirkuit digital yang kompleks.
keuntungan
Mendiagnosis masalah sinyal digital dengan cepat dan meningkatkan efisiensi pengembangan.
Mendukung sinyal multi-saluran dan menganalisis sistem yang kompleks secara bersamaan.
Fungsi pemicunya sangat kuat dan dapat mendeteksi masalah yang terjadi sesekali.
Sistem implementasi - kinerja Yanyan
Perangkat lunak pengujian solid state drive
definisi
Perangkat lunak pengujian solid-state drive adalah alat khusus yang digunakan untuk menguji kinerja, stabilitas, dan kesehatan solid-state drive (SSD), membantu pengguna memastikan bahwa hard drive beroperasi dalam kondisi optimal dan mencegah kehilangan data.
Fungsi utama
Perangkat lunak pengujian SSD menyediakan berbagai fungsi, termasuk:
Tes kinerja:Ukur kecepatan baca SSD, kecepatan tulis, dan kinerja akses acak.
Pemantauan seumur hidup:Periksa kesehatan hard drive, termasuk sisa masa pakai dan keausannya.
Deteksi kesalahan:Mendeteksi kesalahan hard disk atau masalah perangkat keras lainnya.
Pemantauan suhu:Pemantauan suhu pengoperasian SSD secara real-time untuk mencegah kerusakan akibat panas berlebih.
Pembersihan data:Hapus data dengan aman untuk melindungi privasi atau mengosongkan ruang penyimpanan.
item tes
Item tes yang umum meliputi:
Tes Membaca dan Menulis Berkelanjutan:Simulasikan skenario transfer file besar untuk memeriksa stabilitas dan kecepatan.
Tes membaca dan menulis acak:Uji kinerja akses file kecil acak.
Tes IOPS:Mengevaluasi jumlah operasi input/output per detik.
Uji fungsi TRIM:Periksa apakah instruksi pengumpulan sampah dijalankan dengan benar untuk menjaga kinerja.
Skenario aplikasi
Perangkat lunak pengujian SSD cocok untuk berbagai skenario, termasuk:
Lingkungan perusahaan:Pastikan pengoperasian SSD yang stabil di server atau pusat data.
Keperluan pribadi:Periksa apakah SSD di komputer berfungsi normal.
Layanan purna jual:Membantu produsen hard drive dalam pemeriksaan kualitas dan pemecahan masalah.
Keuntungan
Keuntungan perangkat lunak pengujian solid state drive meliputi:
Ketepatan:Memberikan hasil tes yang detail dan andal.
Kenyamanan:Antarmuka yang ramah pengguna membuat pengoperasian menjadi mudah.
Pencegah:Tangkap masalah lebih awal untuk menghindari kehilangan data.
Keberagaman:Mendukung SSD dari berbagai merek dan spesifikasi.
pengembangan masa depan
Arah pengembangan perangkat lunak pengujian solid-state drive di masa depan meliputi:
Integrasi AI:Gunakan kecerdasan buatan untuk prediksi dan analisis kesalahan yang lebih akurat.
Pengujian awan:Menerapkan fungsi pengujian jarak jauh dan analisis data.
Dukungan multi-platform:Meningkatkan kompatibilitas dengan berbagai sistem operasi dan perangkat.
Pengujian otomatis:Raih pengujian serba sekali klik dan tingkatkan efisiensi.
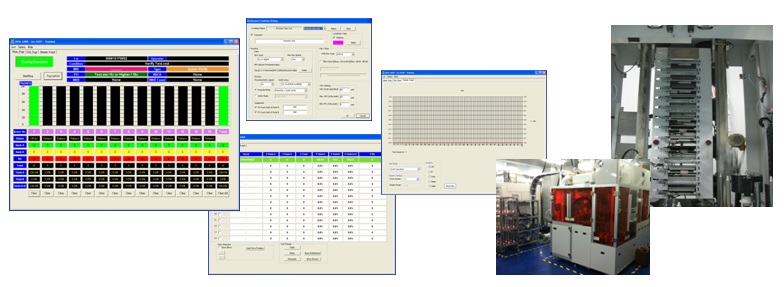
Perangkat lunak pengujian solid state drive: perangkat lunak pengujian kinerja dan pengembangan SSD
Perangkat lunak pengujian kinerja SSD, IOMeter yang disesuaikan, Penguji NVMe, kontrol perintah ATA
Sistem produksi cakram optik
definisi
Sistem produksi cakram optik adalah seperangkat peralatan produksi otomatis yang digunakan untuk memproduksi cakram optik (seperti CD, DVD, dan cakram Blu-ray), yang mencakup berbagai proses seperti pembuatan cetakan, pencetakan stempel, pembakaran data, dan pencetakan label.
Komponen utama
Sistem produksi cakram optik biasanya terdiri dari bagian-bagian berikut:
Mesin cetak kompresi:Infrastruktur yang digunakan untuk memproduksi cakram optik.
Peralatan pembakar data:Bertanggung jawab untuk menulis data ke cakram optik.
Peralatan pencetakan:Digunakan untuk pencetakan pola atau label pada permukaan cakram optik.
Sistem kendali mutu:Uji kualitas cakram optik, seperti integritas data dan cacat permukaan.
Peralatan pengemasan:Bertanggung jawab untuk menyelesaikan pengemasan cakram optik yang sudah jadi.
Proses produksi
Produksi cakram optik biasanya melalui langkah-langkah berikut:
Buat cetakan untuk memastikan struktur cakram memenuhi standar.
Pencetakan kompresi menghasilkan substrat fisik cakram optik.
Lakukan pembakaran data dan tulis konten ke disk.
Lakukan pencetakan permukaan untuk menambahkan label atau pola pada cakram optik.
Melakukan inspeksi kualitas untuk menyaring produk yang tidak memenuhi syarat.
Lengkapi pengemasan dan integrasikan cakram optik ke dalam produk jadi.
Ruang lingkup aplikasi
Sistem produksi cakram optik cocok untuk berbagai situasi, termasuk:
Produksi musik dan video:Produksi massal CD musik dan DVD film.
Penyimpanan data:Menghasilkan cakram optik untuk cadangan dan distribusi data.
Game dan perangkat lunak:Buat CD instalasi untuk permainan atau aplikasi komputer.
Keuntungan
Keuntungan sistem produksi cakram optik meliputi:
Efisiensi tinggi:Mencapai produksi otomatis bervolume besar.
biaya rendah:Mengurangi biaya produksi unit dalam produksi massal.